機能追跡
機能追跡は、太陽/月/惑星のイメージングを支援するために設計されたツールであり、望遠鏡が完全に追跡していなくても、ターゲットが視野から外れるのを防ぐのに役立ちます。 長時間露光のディープスカイイメージング中のガイドは、PHD2ガイドなどのツールを使用して実現できます。
ハードウェア要件
機能追跡を使用するには、次のいずれかを使用する必要があります
● ASCOM互換のGOTOマウント―SharpCap設定のハードウェアタブでマウントを選択し、接続する必要があります。
又は
● パルスガイド対応マウントに接続されたST4パルスガイドポートを備えたサポートされているカメラ。 このオプションを使用するには、[ハードウェア]タブのマウントオプションとして[On Camera ST4]を選択します。
これらのいずれでも、SharpCapはマウントを4方向すべてに移動できますが、ST4オプションでは単一の移動速度しか許可されないため、可能であればASCOMオプションを使用することをお勧めします。
この機能のために個別のガイドスコープやガイドカメラを用意する必要はありません。 SharpCapは、メインのイメージングカメラからの画像を使用して、通常のイメージング機能に影響を与えることなく動きを追跡します。
機能追跡の設定
機能追跡は、[ツール]メニューから選択すると起動され、機能追跡ウィンドウが表示されます。 これは別のウィンドウです。つまり、機能追跡は、フォーカスアシスタンス、シーイングモニター、ヒストグラムなどの他の機能と同時に使用できます。
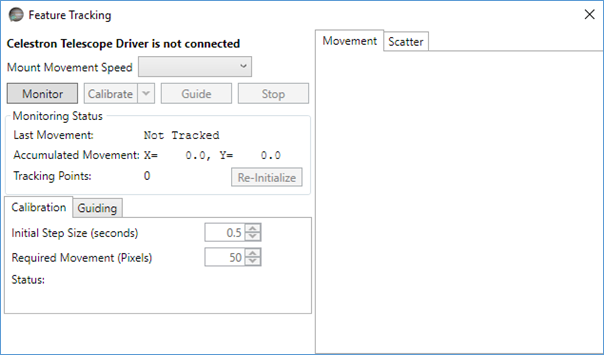
機能追跡ウィンドウの左上には、ガイドに使用されるハードウェアが表示され、ASCOM GOTOマウントが使用されている場合にマウントの移動速度を選択できます。 適切なガイドハードウェアが選択されていない、または接続されていない場合、警告がここに表示され、ガイド機能は使用できなくなります。
画像ドリフトの監視を開始
モニターボタンを押して、画像のドリフトの監視を開始します。 SharpCapは、画像上で識別可能な特徴点の範囲を自動的に検出し、画面上の小さな円で強調表示します。 画像が移動すると、これらのポイントは画像上の機能に追従し、SharpCapは画像がどれだけ移動したか、どの方向に移動したかを追跡できます。
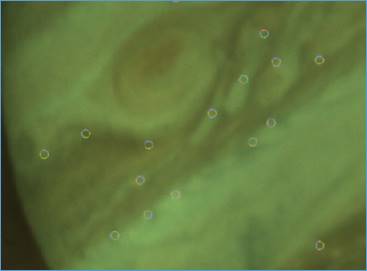
画像のコントラストが非常に低い、または非常に焦点が合っていない場合、SharpCapは正確に追跡するのに十分な画像の特徴を見つけることができない場合があります。
追跡が失われる可能性があります。
● 画像が非常に速く動く。
● 画像が非常に長い距離を移動するため、追跡対象の機能のほとんどが見えなくなります。
● 画像の明るさが大幅に増加または減少した。
画像監視がアクティブな場合、監視ステータス領域は定期的に更新されます。
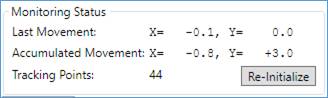
最後の動きの値は、測定された最新のフレームと前に測定されたフレームの間で画像がどれだけ移動したかを示します。 蓄積された動きは、監視が開始されてから検出された画像の動きの総量を示します。 これらの測定値はピクセル単位です。
トラッキングポイントの値は、SharpCapが現在追跡している画像上の機能の数を示します。 追跡対象の機能の数が減少した場合は、[再初期化]ボタンを使用して、監視がまだアクティブな間に追跡する機能の新しいセットを見つけることができます。
マウントを少し動かして、トラッキングが正しく機能しているかどうかをテストすることもできます。これが検出され、累積移動量の値が変化するはずです。
キャリブレーション
SharpCapは、マウントを4つの異なる方向(RA +/-、Dec +/-またはAlt +/-、Az +/-)に移動したときに画像が移動する方向(および距離)を計算する必要があります。 これは、カメラの向き、望遠鏡の焦点距離、望遠鏡の光学構成、レデューサーまたは使用されているBarlowレンズなどのさまざまな要因の影響を受けます。上記のすべての情報を入力する必要がないようにするためには、 エラーが発生しやすい)、SharpCapはマウントを各方向に移動し、イメージがどのように移動するかを測定することによってこの情報を計算します。このプロセスはキャリブレーションと呼ばれます。
1つの画像監視が適切な数のトラッキングポイントで正常に実行されています。[校正]ボタンを押して、校正プロセスを開始してください。
キャリブレーションプロセス中に、SharpCapはマウントを4方向のそれぞれに移動します。小さな動きから始まり、イメージのシフトが検出されるまでサイズを徐々に増やします。 SharpCapは、50ピクセルの合計画像シフトが測定されるまで、マウントを移動し続けます(この値は、キャリブレーション設定で構成できます)。 各方向のキャリブレーションプロセス中に、X軸上のマウントの総移動に対するY軸上の測定されたイメージの移動を示すグラフが描画されます。
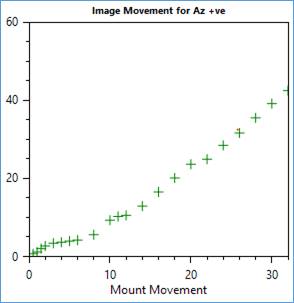
グラフは一般的に直線でなければなりませんが、ここに示すように、最初のマウント動作では画像がそれほど動かないのが一般的です。これは、マウントメカニズムのバックラッシュが原因であり、通常、 バックラッシュが過剰です。
キャリブレーションプロセスの4つのフェーズ中に、4つのマウント移動方向のそれぞれに応じて画像がどのように移動したかを示すグラフが[散布図]タブに作成されます。 このグラフは、「X」または十字形を形成する必要があります。 2本の腕はほぼ真っ直ぐで、互いに直角に近い位置にある必要があります。
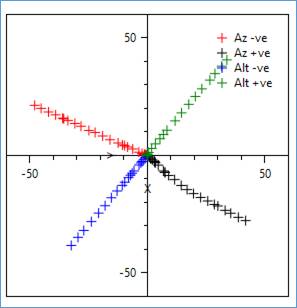
散布図が上に示したものと似ていない場合、キャリブレーションプロセスは失敗する可能性があります。 キャリブレーションの失敗の考えられる原因は次のとおりです。
● SharpCapがマウントを4方向のいずれかに移動しても、画像が移動しない
● マウントを反対方向に動かすと、画像が大きく異なる速度で動く
● マウントを反対方向に移動すると、画像が反対方向に移動しません
● マウントがRA(またはAz)軸で移動したときにイメージが移動する方向は、マウントがDec(またはAlt)で移動したときにイメージが移動する方向とほぼ直角ではありません。
上記のすべての最も可能性の高い原因は、マウント動作の過度のバックラッシュです。 バックラッシュの影響を減らすために、(可能な場合)より高い移動速度を選択すると役立つ場合があります。 [初期ステップサイズ]または[必要な移動]の値を高く設定することも役立つ場合があります。 キャリブレーションが失敗した理由は、キャリブレーションコントロールの[ステータス]領域に表示されます。SharpCapガイドログには、通常のSharpCapログファイルと同じフォルダーにある詳細情報が表示される場合があります。
キャリブレーションが正常に完了すると、ガイドボタンが有効になります。
[注意] 校正が正常に完了すると、SharpCapは校正結果を保存して、後で再利用できるようにします。 SharpCapを再起動した後に機能追跡に戻った場合は、[調整]ボタンの右側にあるドロップダウンを使用して、保存された調整を読み込むことを選択できます。

保存されたキャリブレーションは、カメラを調整または回転しておらず、同じ空の領域でまだ画像を撮影している場合にのみ有効です。
ガイド実行
以前に保存したキャリブレーションをキャリブレーションまたはロードした後、ガイドボタンを押してガイドを開始します。 SharpCapは、ターゲットをほぼ静止した状態に保つようにマウントを移動しようとします。 SharpCapはターゲットを「ピクセルパーフェクト」レベルに固定しようとするのではなく、ゆっくりと視野から外れないようにするためです。
ガイドプロセスのステータスは、ガイドとしてアクティブになっているときにX = 0およびY = 0の近くに留まるはずの累積移動情報を確認し、画像の移動の履歴と修正の両方を示す移動グラフを表示することによって監視できます。
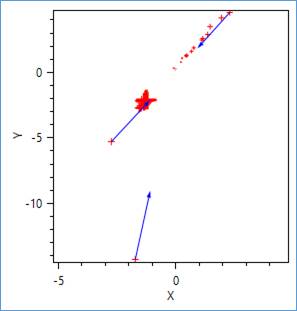
ムーブメントグラフの赤い十字は、ターゲット位置に対する画像の位置の測定値を表します(X軸とY軸はピクセルで測定されます)。 最新の測定値は大きな赤い十字で示され、古い測定値は小さくなっています。 青い矢印は、画像を目標位置に戻すために行われたガイド修正を表しています。
ガイド手順を制御するために行うことができる3つの調整があります。
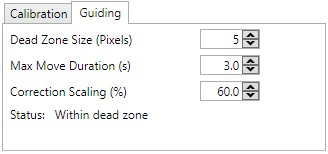
● デッドゾーンサイズ―これは、ガイド補正がまったく行われない、ターゲット位置の周りのゾーンのサイズ(ピクセル単位)です。 デフォルトは5ピクセルです。
● 最大移動時間―ガイド修正の一部として発行される移動コマンドの最大長(秒単位)。 実際の移動量は、これと選択した誘導率の両方に依存します。
● 修正スケーリング―ガイドコマンドを発行するときに適用される計算された修正のパーセンテージ。 通常、これを50〜70%の間に設定すると、キャリブレーションデータが100%正確でなくても、ターゲットの片側から反対側への過剰補正や振動の問題が発生しなくなります。