ポーラーアライメント
SharpCap Polar Alignmentは、天文学者が優れた極整列を迅速、簡単かつ確実に実現できるように設計されています。 このアイデアは、Themos Tsikasによって作成されたPhotoPolarAlignアプリケーションに触発されました。 Themosは、SharpCapの極位置合わせ機能の開発中のテストと提案に役立つほど親切でした。
極位置合わせ手順は、[ツール]メニューから開始できます。
それはどのように機能?
極配置は、極近くの領域で撮影された2つの写真を分析することによって機能します。 1つの写真を撮ってSharpCapに分析させ、マウントをRA軸を中心に約90度回転させて、2番目の写真を撮ります。 各写真の星を認識することにより、SharpCapは2つのことを実行できます。
1. 各画像で表される空の正確な領域-このプロセスは、プレートソルビングと呼ばれます。 SharpCapには、プレート接続アルゴリズムが組み込まれており、インターネット接続やその他のプログラムやデータベースをインストールする必要はありません。 SharpCapのプレート解法は、極から5度以内でのみ機能します(NまたはS)。
2. 最初の画像から2番目の画像に移動するときに星が回転しているように見える回転の中心。
SharpCapは各画像で望遠鏡が向けていたRAとDecを正確に計算したので、天体極が画像内のどこにあるか(または画像からどれだけ離れているか)がわかります。 SharpCapは、星が回転しているように見える点も知っています。これが、マウントのRA軸が現在指しているところです。 これらの2つの点が同じである場合、極配置は完璧です。 それらが同じでない場合、必要なことは、マウントの高度と方位角の調整器を同じ点に調整して、極の位置合わせを完了することだけです。
SharpCapは、画面上の指示に従ってこのプロセスをガイドします。これには、マウントを各方向に移動して完全に位置合わせするために必要な距離のライブアップデートが含まれます。
必要なもの?
● 赤道儀。
● マウント上の望遠鏡/ファインダースコープと組み合わせたSharpCapでサポートされているカメラ。
● 0.5度から約2.5度のカメラの視野。
● 視野内に少なくとも15個の星が見える。
● 極から約5度以内に既に位置合わせされている。
極位置合わせプロセスはこの種の位置ずれの影響を受けないため、ガイダースコープまたはメインスコープを完全に位置合わせする必要はありません。
ステップバイステップ
極位置合わせツールを最初に選択すると、SharpCapはカメラからの各フレームをプレート解決しようとします。 十分な数の星が検出され、視野が適切なサイズで、極に十分近い場合、次のようなものが表示されます。
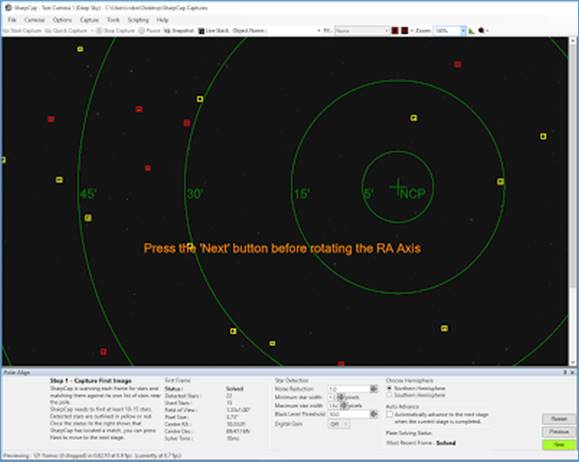
SharpCapがプレート解決を実行するために使用している星は黄色で強調表示され、他の星は赤で強調表示されます。 北(または南)の天体極が表示され、その周りに異なる半径の円が表示されます。 ポールが見えない可能性があることに注意してください-ポールが見えなくても心配しないで、次のステージに進んでください。
[注意] SharpCapが次のステージに進む準備ができており、ユーザーがボタンを押す必要がある場合、[次へ]ボタンは緑色に変わります。
プレートの解決が失敗した場合、3つの原因が考えられます。
1. 十分な星が検出されませんでした。
2. ポールから遠すぎる。
3. 視野が大きすぎる、または小さすぎる。
最後の2つは、設定を物理的に変更する必要がありますが、最初の2つは、画面下部の星検出パラメーターを調整するか、使用中のカメラの露出またはゲインを調整することで修正できる場合があります。 星が暗すぎる場合は、露出、ゲイン、またはデジタルゲインを上げてみてください。 ホットピクセルまたはノイズが星としてピックアップされている場合は、ノイズリダクションコントロールを上げてみてください。
最初のフレームが解決されたら、[次へ]ボタンを押して次のステージに移動します。
NEXTを押した後、RA軸を約90度回転させます。 これを行うには、RAクラッチのロックを解除するか、マウントのGOTOシステム(ある場合)を使用します。
SharpCapは引き続き各フレームのプレート解決を試みます ― 十分に回転したフレームを解決できたら、次のような調整フェーズに進むオプションが提供されます。
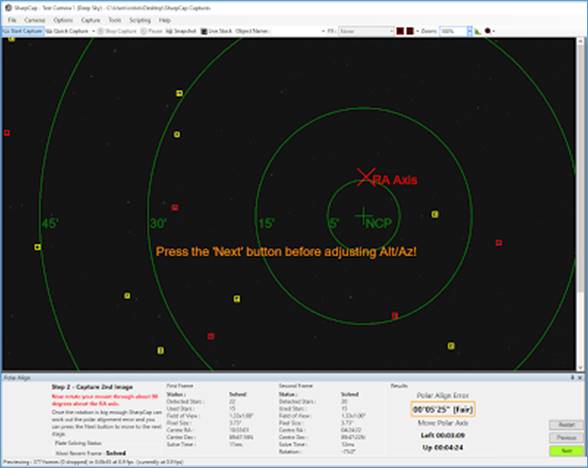
この時点で、SharpCapはRA軸が指している画像内の位置を計算しました。これは、画像が回転しているように見える点の周りです。 RA軸のポイントは表示されない可能性があるため、[次へ]ボタンが有効になっている限り、表示されなくても心配はいりません。
「次へ」ボタンが有効になっていない場合は、回転量を変えてみてください(または反対方向に回転させてください)。 それでも失敗する場合は、回転した位置に十分な数の星が集まっていない可能性があります。これを修正する最善の方法は、マウントを回転した位置にして、「再起動」ボタンを押して最初の位置に戻ることです。 アライメントプロセス。 これにより、プレートのソルブがその方向で達成されるまで、星の検出コントロールを使用して回転した位置のビューを残すことができます。
次が最終ステージへの移動を要求されるまで、高度または方位角を調整しないでください。
ボタンを押して調整ステージに移動すると、次のように、画面上の明るい星の1つがターゲットを指す矢印で強調表示されます。
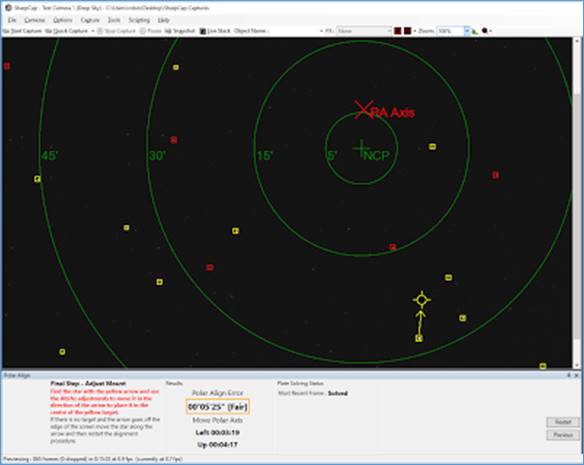
良好な極配置を取得するために必要なことは、示された星をターゲットに移動することだけです。これにより、NCPとRA軸が整列し、極配置が実行されます。 画面下部の極整列エラーの図の下に、マウントを移動する必要がある方向を示すいくつかのガイドラインがあります。 これらは、現地時間とGMTの間のオフセットから計算される推定経度に基づいて計算されるため、正確ではありません。
調整段階では、ハイライト表示された星が別の星に切り替わることがあります。心配する必要はありません。調整を続けるだけです。 これが近づくと、矢印とターゲットが、位置合わせプロセスを完了するためにまとめる必要がある平行線のペアに変わります。
矢印の長さが更新されていない、または時々しか更新されていないことが判明した場合は、すべてのフレームでプレートソルバが機能していない可能性があります-問題を無視して、星をターゲットに入れるだけです または、ゲインまたは露出をさらに微調整して、星の検出とプレートの解決がより確実に機能するようにします。 アークの2分未満のアライメントエラーは良好と見なされ、1分未満のアークは優れています。 アラインメントエラーをゼロまで減らすために時間を無駄にしないでください。
ヒント
● ガイドカメラ(ZWO120MC、QHY5LII、Altair GPCAMなど)を使用し、焦点距離が約200mmのファインダーガイダーを使用してみます。これにより、正しい視野が得られます。
● 画面上の指示を読みます―彼らは手順をウォークスルーします。
● 高ゲインと露出4〜8秒を選択します―これにより、SharpCapは十分な星を見ることができます。
● マウントが桟橋にある場合、桟橋の取り付けプレートのボルトは、マウント自体のalt / azimuthアジャスターよりも細かい調整を行うことができます。
● スコープまたはファインダーがマウントに正しく位置合わせされているかどうか心配しないでください―位置ずれが結果に影響することはありません。
● マウントを移動する必要がある方向(上/下/左/右)を決定するには、SharpCapはおおよその経度を知る必要があります。 タイムゾーンが正しく設定されていない場合、間違った方向が提案される可能性があります。
極合わせのトラブルシューティング
以下の情報は、極位置合わせツールでよく発生する多くの問題の解決に役立ちます。
どれだけ調整しても、エラーをゼロにすることはできません。
やめる!!! 極整列エラーを正確にゼロにする必要はありません。しようとすると、晴天時間が無駄になります。 極から1アーク分以内の極の位置合わせは、通常、長時間露光イメージングに最適で十分であると考えられています。
最初のステップで立ち往生? 「次へ」ボタンが有効になることはありませんか?
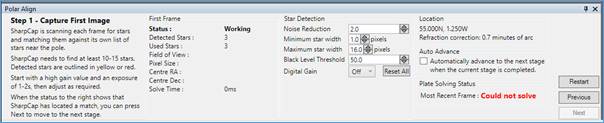
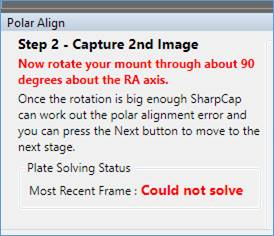
この段階で立ち往生しているということは、SharpCapがカメラからのビューを解決できず、カメラが指しているポールの近くの場所を解決できないことを意味します。 最新のフレームステータスは常に赤色で「解決できませんでした」となり、最初のフレームステータスは「動作中」となります。 時々、カメラからのフレームが他のフレームよりも少し優れていて、プレートが解決する場合、最終的にこのステージを通過することに気付くでしょう–行き詰まってしまうので、それが起こっても先に進むように誘惑されないでください– 代わりに以下のトラブルシューティング手順を実行して問題を修正してください。
この問題の考えられる原因は次のとおりです。
十分な星が検出されていません
検出された星の数が少ない(10未満)場合は、これが最も可能性の高い原因です。 問題を修正するためのいくつかの提案があります
● カメラの露出を最大2〜4秒に増やす。
● カメラにゲインコントロールがある場合は、カメラゲインを上げます。 約1/2のゲインで開始し、最大に向かって作業します
● カメラにゲインコントロールがない場合は、2倍または4倍のデジタルゲインを試してください。
● スター検出設定を調整した場合は、それらをデフォルトにリセットします。
カメラ/望遠鏡がポールから5〜6度以上離れている
たくさんの星が検出されているが、プレートの解決がまだ失敗する場合は、極から離れすぎているところから開始している可能性があります
SharpCapには、極から5度離れた星のデータベースがあります(SharpCap 3.1では7度)。 画像がこれよりも極から離れた領域で撮られた場合、プレートの解決は失敗します。 ネットワークに接続している場合は、フレームを保存し(「スナップショット」ボタンを押し)、極座標からの距離を確認して、プレート解析のためにnova.astrometry.netにアップロードします。 PCにプレート解析ツールがインストールされている場合は、代わりにそれを使用できます。
ホットピクセルが星として検出されています
一部のカメラは、ホットピクセル(光が当たっていなくても最大値を持つピクセル)に悩まされています。 一部のスター検出設定では、単一のホットピクセルがスターとして検出される場合があります。 これらのホットピクセルが十分に存在して検出された場合、プレート解決アルゴリズムを混乱させる可能性があります。
オプションの組み合わせがホットピクセルを星として検出することを意味する場合、SharpCap 3.1以降では、星検出オプションの下に警告が表示されます。 使用している露出/ゲイン設定でカメラがホットピクセルになりやすい場合にのみ、このことを心配する必要があります。 ノイズリダクション設定を大きくする、最小スター幅を大きくする、またはデジタルゲインを小さくすることで、ホットピクセルの検出を停止できます。
ステップ2またはステップ3で動かなくなった、何も更新されない、またはすべてに非常に長い時間がかかる
望遠鏡を調整したり、極座標調整プロセスの新しいステップにSharpCapを移動したりしたら、結果が表示されるまで、またはSharpCapが解決策を見つけるまでに数秒かかるのが普通です。 15秒以上待っている場合は、何かが適切ではなく、最も一般的な原因は、SharpCapがカメラからのすべてのフレームをプレート解決できないことです。実際には、10または 100分の1です。
この問題は、「最近のフレーム」のステータスがほとんどの場合「赤で解決できなかった」ので、時々緑の「解決済み」に変わるため、簡単に見つけることができます。
この問題の原因は、上記のステップ1でスタックする問題とまったく同じです。 この問題の最善の解決策は、位置合わせプロセスを再開し、「最新のフレーム」のステータスがすべてのフレームで「解決済み」と表示されるまで上記の提案に従うことです。
ステップ1ですぐに適切な解決策があったとしても、ステップ2でこの問題が発生する場合があることに注意してください。これは、RA軸を中心とした回転がカメラを動かして、めっきが困難な空の領域を指すことが原因である可能性があります 解決します(おそらく、明るい星が少なくなります)。 この問題の良いトリックは、RA軸を回転させたまま、SharpCap Polar Alignルーチンをステップ1にリセットすることです。次に、カメラの設定と星の検出設定を調整して、回転位置で適切なプレートを解決してから、回転を戻してプロセスを続行します。 ホームポジションに。
SharpCapは、調整後の極座標調整は素晴らしいと言っていますが、そうではありません!
最初に確認することは、マウントのAlt / Azの調整を開始する前に、「次へ」ボタンを押して調整ステージに移動したことです。 調整段階に移動しないと、極の配置が不正確になります。 SharpCap 3.1にアップデートして、極座標の整列を改善し、この一般的なスリップをより困難にすることができます。
次の最も一般的な原因は、マウントがRA軸を中心に回転しているときに何かがシフトすることです。 ガイドスコープ/カメラを使用している場合は、スコープがしっかりと取り付けられていないか、ケーブルが引っ張られている(または緩んでいる)ため、カメラが少しずれる可能性があります。 この問題は、RA軸のベアリングに問題がある人にも発生しています。
この問題が疑われる場合に最初に行うことは、問題があることを確認することです。 SharpCap極調整を通常どおり(ホームポジションから開始して90度回転して)実行し、通常どおり調整します。 終了したら、スコープを90度の位置のままにして、SharpCapで極配置を再実行します(今度は、回転するように指示されたらホーム位置に回転します)。 2回目のPA実行の測定値が最初のPA実行と一致する場合、おそらくこの問題はありません。 それが大きなマージンで一致しない場合は、回転に伴うたわみ/動きが原因である可能性があります。
SharpCap 3.1では、マウントを約15度ずつ回転させることで、この問題を簡単にテストできます。 SharpCapは、回転の各段階の回転の中心(RA軸が指している場所)と計算された点に濃い赤の十字をプロットします。たわみがない場合、これらは画面上に密なグループを形成するはずです。 下のスクリーンショットでは、左側に示す極の位置合わせの実行のために、ガイドカメラへのケーブルを緩やかに垂らしています。 ここでは、カメラを引っ張っているケーブルの重さのために、さらに回転させたときに、測定されたRA軸の位置がずれていることがわかります。 ケーブルが適切に固定されると、RA軸の位置がより緊密なグループを形成します。
緩いケーブル
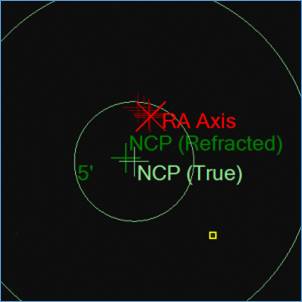
安全なケーブル
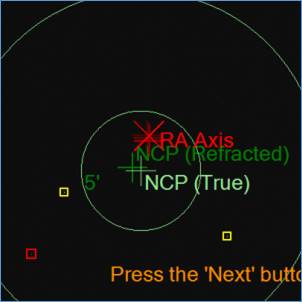
回転時のたわみに問題があることが判明した場合は、すべての接続を締めてすべてのケーブルを固定するという通常のハードウェア修正を試すことができます。 役立つもう1つの可能性のあるトリックは、極位置合わせの2つのステップをホームの左約30〜40度とホームポジションの右30〜40度で実行することです。 機器の構成によっては、回転後に「上」から「横」に移動するのではなく、穴の手順中にスコープが主に「上」になるため、このアプローチを使用するときにたわみが少なくなる場合があります。
SharpCapがマウントを移動する必要があるという指示が間違っている
まず、マウントAlt / Azを調整する前に、「次へ」ボタンを押して調整ステージに移動したことを確認してください。 [次へ]ボタンを押す前に調整を開始すると、最終的な調整結果が正しくなくなり、方向表示(上/下/左/右)が正しく機能して表示されなくなります。 SharpCap 3.0を使用している場合は、SharpCap 3.1に更新します。SharpCap3.1を押すと、方向ガイドのみが表示され、この問題を回避できます。
第2に、与えられた方向はあなたがあなたのマウントを見ているとあなたがポールの方向に向いている(すなわち望遠鏡があなたのポールから離れて向いている)ことを想定していることを思い出してください。 上に移動するという指示は、「望遠鏡の対物レンズの端が上を向くようにマウントの高度を移動する」ことを意味し、右は「望遠鏡の対物レンズの端がさらに右を指すようにマウントの方位角を移動する(NHの東側) 。SHの場合は西)